
Данный проект направлен на создание простого, но функционального автоматизированного устройства, которое самостоятельно регулирует микроклимат внутри миниатюрной теплицы. Используя недорогие электронные компоненты и микроконтроллер Arduino, мы моделируем систему, которая:
- открывает или закрывает окно (или заслонку) в зависимости от температуры;
- включает дополнительное освещение при недостатке солнечного света.
Этот проект сочетает датчики окружающей среды, исполнительные механизмы (сервомотор, светодиод) и логическое управление на микроконтроллере, что даёт реальное представление о том, как работает умная автоматика в сельском хозяйстве.
Кроме того, проект способствует развитию навыков в следующих областях:
- проектирование систем на базе Arduino;
- работа с аналоговыми и цифровыми сигналами;
- программирование логики управления;
- интерпретация физических показателей (температура, свет) и преобразование их в управляющие действия.
Таким образом, проект не только полезен в учебной среде, но и имеет потенциал практического применения в реальной жизни.
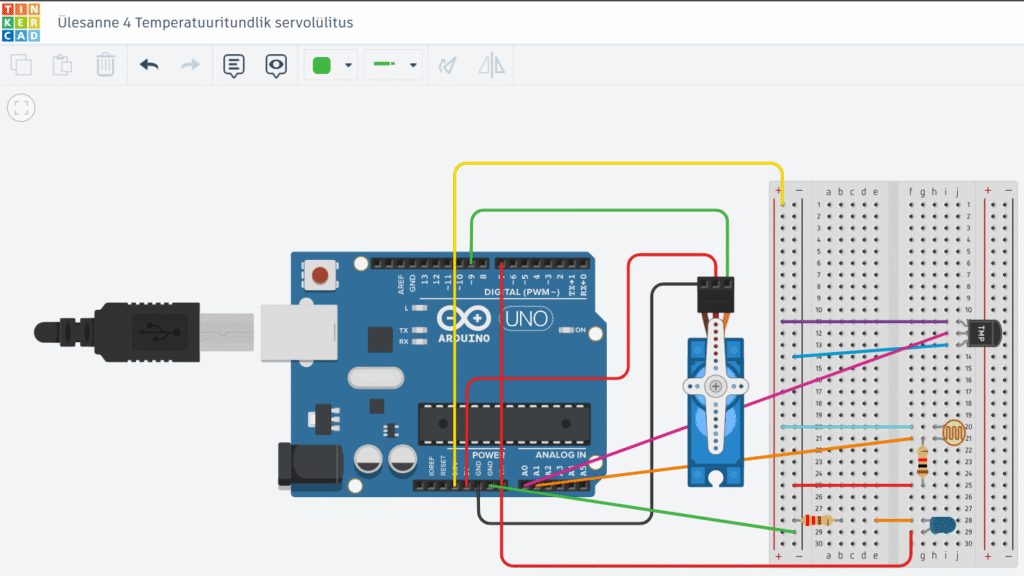
Компоненты, используемые в проекте
- Температурный датчик (например, TMP36, LM35 или DHT11)
— измеряет температуру воздуха и передаёт данные на Arduino. - Фоторезистор (LDR)
— измеряет уровень освещённости. - Сервомотор (например, SG90)
— открывает или закрывает вентиляцию/окно, в зависимости от температуры. - Светодиод (LED)
— включает дополнительное освещение при низком уровне света. - Arduino Uno
— основной контроллер, обрабатывающий данные от датчиков и управляющий выходами. - Резисторы, провода, макетная плата (breadboard), источник питания
— стандартные элементы для сборки схемы.
#include <Servo.h>
// Определение пинов
const int tempPin = A0;
const int ldrPin = A1;
const int ledPin = 7;
const int servoPin = 9;
const int photoresistorPIN = A1;
int lightLevel, high = 0, low = 1023;
// Константы
const int LIGHT_THRESHOLD = 500;
const float TEMP_LOW = 5.0;
const float TEMP_HIGH = 10.0;
// Глобальные переменные
Servo greenhouseServo;
int currentServoAngle = 0;
float temperature = 0;
unsigned long previousServoMillis = 0;
const int servoInterval = 20;
void setup() {
pinMode(ledPin, OUTPUT);
greenhouseServo.attach(servoPin);
greenhouseServo.write(currentServoAngle);
Serial.begin(9600);
// Тест LED
digitalWrite(ledPin, HIGH);
delay(1000);
digitalWrite(ledPin, LOW);
}
void loop()
{
readTemperature();
controlServo();
int photoresistorVALUE = analogRead(photoresistorPIN);
lightLevel = photoresistorVALUE;
autoTune(); // Настроим яркость по данным с фоторезистора
// Управление LED на основе освещенности
analogWrite(ledPin, 255 - lightLevel); // Инвертируем, так как чем больше света, тем меньше нужно светить
Serial.print(photoresistorVALUE);
Serial.println(lightLevel);
}
void autoTune() {
// Настроим диапазон значений для фоторезистора
if (lightLevel < low) low = lightLevel;
if (lightLevel > high) high = lightLevel;
lightLevel = map(lightLevel, low + 10, high - 30, 0, 255);
lightLevel = constrain(lightLevel, 0, 255);
}
void readTemperature() {
int reading = analogRead(tempPin);
float voltage = reading * (5.0 / 1024.0);
temperature = (voltage - 0.5) * 100;
Serial.print(temperature);
}
void controlServo() {
int targetAngle = currentServoAngle;
if (temperature <= TEMP_LOW) {
targetAngle = 0;
}
else if (temperature >= TEMP_HIGH) {
targetAngle = 180;
}
if (millis() - previousServoMillis >= servoInterval) {
previousServoMillis = millis();
if (currentServoAngle < targetAngle) {
currentServoAngle = min(currentServoAngle + 5, targetAngle);
}
else if (currentServoAngle > targetAngle) {
currentServoAngle = max(currentServoAngle - 5, targetAngle);
}
greenhouseServo.write(currentServoAngle);
Serial.println(currentServoAngle);
}
}
Разбор кода
1. Подключение библиотеки
#include <Servo.h>
Подключает библиотеку для работы с сервомотором.
2. Объявление пинов и глобальных переменных
const int tempPin = A0;
const int ldrPin = A1;
const int ledPin = 7;
const int servoPin = 9;
tempPin— входной пин для температурного датчика.ldrPin— пин для фоторезистора.ledPin— выходной пин для управления LED.servoPin— выходной пин для управления сервомотором.
3. Константы
const int LIGHT_THRESHOLD = 500;
const float TEMP_LOW = 5.0;
const float TEMP_HIGH = 10.0;
Эти значения определяют пороги, при которых система начинает действовать:
- При температуре ≤ 5 °C — окно закроется.
- При температуре ≥ 10 °C — окно откроется.
4. Инициализация компонентов
void setup() {
pinMode(ledPin, OUTPUT);
greenhouseServo.attach(servoPin);
greenhouseServo.write(currentServoAngle);
Serial.begin(9600);
// Тест LED
digitalWrite(ledPin, HIGH);
delay(1000);
digitalWrite(ledPin, LOW);
}
- Устанавливается режим работы пинов.
- Сервомотор инициализируется и устанавливается в начальное положение (0°).
- Запускается последовательный порт (Serial) для отладки.
- Выполняется короткий тест светодиода.
5. Главный цикл программы
void loop() {
readTemperature(); // Считывание температуры
controlServo(); // Управление положением сервомотора
int photoresistorVALUE = analogRead(photoresistorPIN); // Чтение с фоторезистора
lightLevel = photoresistorVALUE;
autoTune(); // Автоматическая калибровка диапазона освещённости
analogWrite(ledPin, 255 - lightLevel); // Управление яркостью LED
Serial.print(photoresistorVALUE);
Serial.println(lightLevel);
}
- Чтение температуры и вызов функции управления серво.
- Считывание текущего уровня освещённости.
- Функция autoTune калибрует входящие данные от LDR (подробности ниже).
- В зависимости от света LED становится ярче или тусклее.
- Вывод данных на монитор порта (для отладки).
Подфункции
6. Чтение температуры
void readTemperature() {
int reading = analogRead(tempPin);
float voltage = reading * (5.0 / 1024.0);
temperature = (voltage - 0.5) * 100;
Serial.print(temperature);
}
- Аналоговый сигнал преобразуется в напряжение.
- Затем — в температуру (формула для TMP36).
- Вывод температуры в Serial Monitor.
7. Плавное управление сервомотором
void controlServo() {
int targetAngle = currentServoAngle;
if (temperature <= TEMP_LOW) {
targetAngle = 0;
}
else if (temperature >= TEMP_HIGH) {
targetAngle = 180;
}
if (millis() - previousServoMillis >= servoInterval) {
previousServoMillis = millis();
if (currentServoAngle < targetAngle) {
currentServoAngle = min(currentServoAngle + 5, targetAngle);
}
else if (currentServoAngle > targetAngle) {
currentServoAngle = max(currentServoAngle - 5, targetAngle);
}
greenhouseServo.write(currentServoAngle);
Serial.println(currentServoAngle);
}
}
- Определяет целевой угол в зависимости от температуры.
- Плавно (шагами по 5°) изменяет угол, чтобы движение сервомотора было плавным, а не резким.
- Ограничивает частоту обновления через проверку времени (
millis()).
8. Автокалибровка освещённости
void autoTune() {
if (lightLevel < low) low = lightLevel;
if (lightLevel > high) high = lightLevel;
lightLevel = map(lightLevel, low + 10, high - 30, 0, 255);
lightLevel = constrain(lightLevel, 0, 255);
}
- Автоматически настраивает минимальные и максимальные значения освещённости.
- Использует
map()иconstrain()для нормализации значенияlightLevelот 0 до 255. - Это нужно, чтобы подстроиться под разные условия освещения (например, разная погода).
Выводы
- Код функциональный и работоспособный.
- Основные цели проекта — реакция на температуру и освещение — реализованы.
- Можно доработать:
- температурные пороги;
- использовать
map()для расчёта угла серво на основе температуры (например:map(temp, 20, 30, 0, 180)).