
Реферат: Роботы в космосе
История
Применение роботов в космосе началось в середине XX века, когда стало ясно, что не все задачи безопасны или возможны для человека. Первым успешным примером можно назвать советский аппарат “Луна-9”, который в 1966 году совершил мягкую посадку на Луне и передал снимки поверхности.

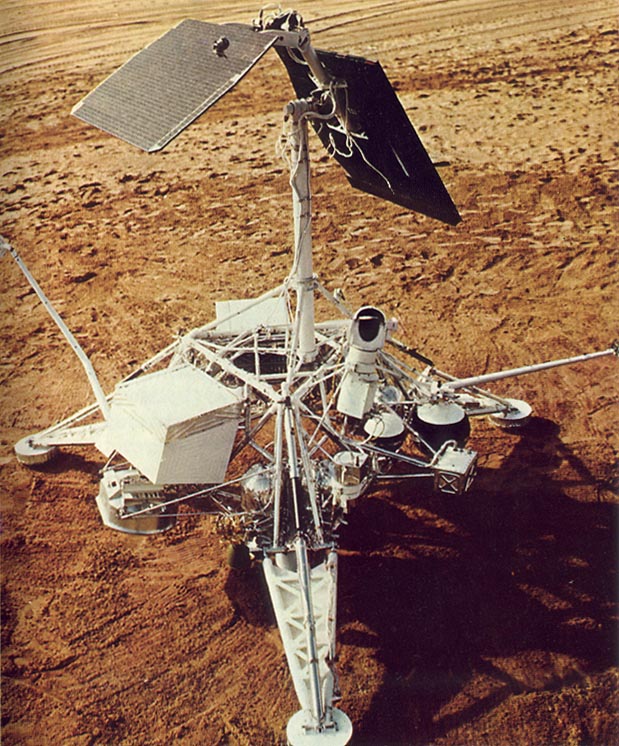
Позднее США отправили серию автоматических станций “Сервейер”, а затем — роботов на Марс.
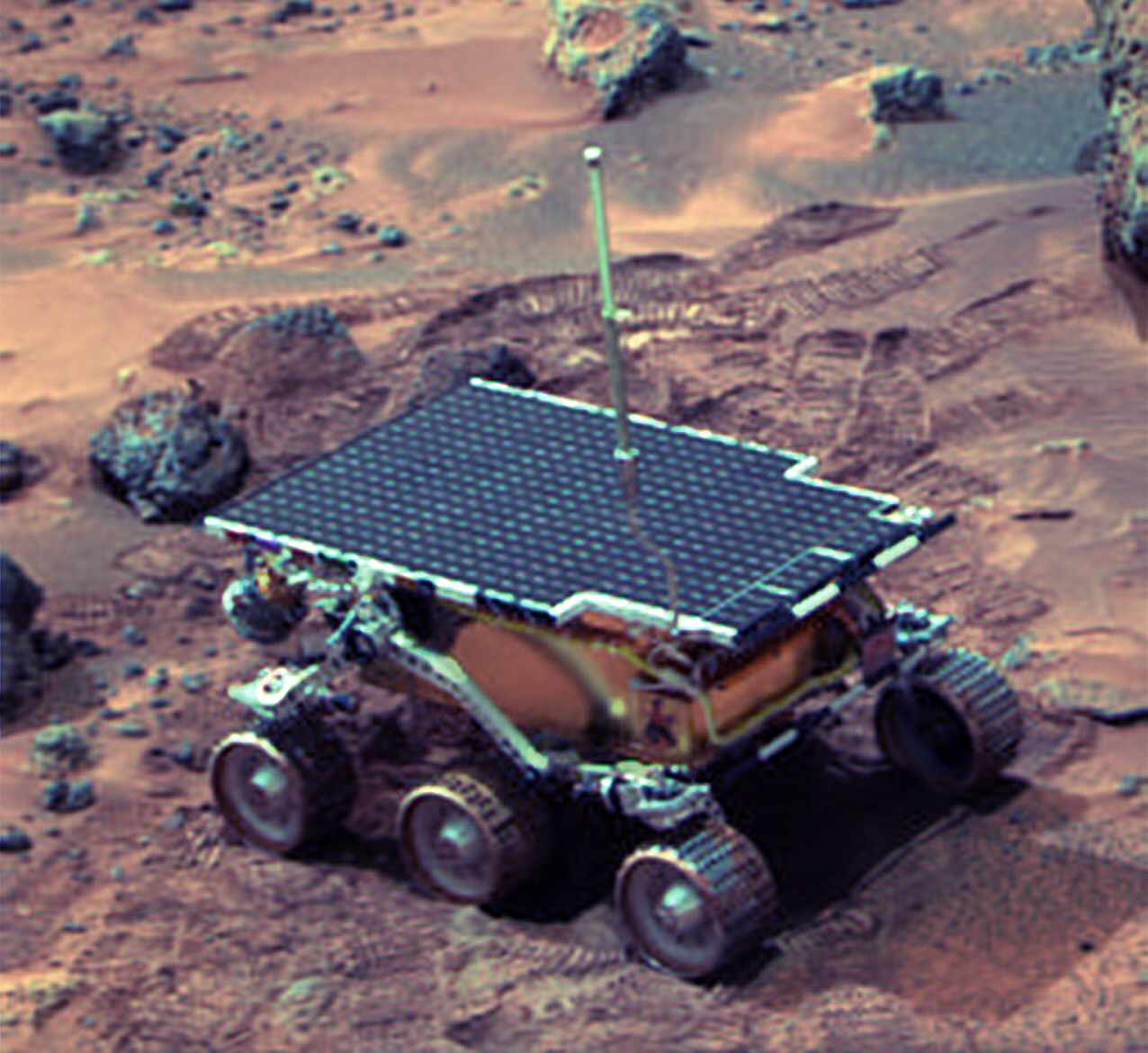
В 1997 году марсоход “Соджорнер” стал первым подвижным роботом, исследовавшим Марс.
С тех пор роботы стали незаменимыми участниками практически всех исследовательских космических миссий.
Принцип работы
Космические роботы работают либо автономно, либо под управлением с Земли. Они оснащаются:
- сенсорами и камерами для ориентации и съёма информации,
- манипуляторами (роботизированными “руками”) для захвата объектов,
- системами навигации и даже элементами искусственного интеллекта.
Из-за задержек в передаче сигнала на большие расстояния (например, до Марса) роботы должны уметь принимать решения самостоятельно в пределах запрограммированных алгоритмов.
Цель создания робота
Космические роботы создаются для выполнения задач, которые могут быть:
- слишком опасны или невозможны для человека,
- технически сложны и требуют высокой точности,
- длительными по времени, когда человеку трудно находиться в условиях космоса.
Также роботы используются для:
- сбора научных данных,
- подготовки будущих пилотируемых миссий,
- ремонта и обслуживания спутников и космических станций.
Пример — робот “Робонавт” от NASA, предназначенный для помощи астронавтам на МКС.

Применение
На сегодняшний день роботы выполняют множество задач в космосе:
- Исследуют поверхности других планет (например, “Curiosity” и “Perseverance” на Марсе)
- Производят ремонтные работы в открытом космосе
- Помогают на Международной космической станции
- Запускаются в составе автоматических станций для изучения Луны, астероидов и комет
- Работают с телескопами (например, “Джеймс Уэбб”)

https://en.wikipedia.org/wiki/Curiosity_(rover)
Пример видео
[NASA: Посадка ровера Perseverance на Марс (официальная анимация и реальные кадры)]
https://www.youtube.com/watch?v=4czjS9h4Fpg
Это видео показывает, как робот совершает посадку на поверхность Марса, использует парашют, ракетные двигатели и затем начинает миссию — отличная демонстрация современных технологий.
Плюсы и минусы
Положительные стороны:
- Возможность исследования недоступных и опасных мест
- Снижение риска для жизни человека
- Экономичность в долгосрочной перспективе
- Высокая точность выполнения задач
- Долгосрочная автономная работа
Отрицательные стороны:
- Высокая стоимость разработки и запуска
- Возможны поломки или ошибки при посадке
- Ограниченная адаптивность (если нет ИИ)
- Задержка в управлении при дальнем расстоянии
Развитие
Современные технологии стремительно развиваются. Ожидается, что в будущем роботы будут:
- более умными (с ИИ),
- более самостоятельными,
- смогут самообслуживаться и ремонтироваться,
- участвовать в строительстве баз на Луне или Марсе,
- использовать местные ресурсы (например, грунт Марса для постройки укрытий).
Прототипы таких систем уже тестируются в лабораториях NASA и ESA.
Заключение
Роботы играют важнейшую роль в освоении космоса. Они позволяют нам изучать другие планеты, собирать уникальные научные данные, готовить экспедиции будущего. Несмотря на сложности и затраты, роботы стали незаменимыми помощниками человека за пределами Земли.
С каждым годом их возможности расширяются, и в будущем именно они помогут человечеству сделать следующий шаг вглубь Вселенной.